
机器人智能焊接磨抛研究中心
中心负责人:张华军 研究员
团队构成:
中心现有研究员1名,客座研究员1名,副教授1名,助理研究员1名,访问学者1名,博士后4名,博士研究生5名、硕士研究生2名。
研究目标:
面向深海装备超高强钢/钛合金、大厚板、全熔透、空间曲线等高效精准智能化一体化建造需求,建设厚板双机器人智能焊接增材及打磨一体化制造、船体分段及合拢空间焊缝智能化焊接打磨检测一体化制造测试平台,支撑新一代深海装备精密高效可靠建造。
研究内容:
智能焊接打磨一体化制造平台
由大跨度龙门式双大负载机器人、TIG/MIG焊机、AGP600/ECM1300液控浮动力控电主轴、换刀及换枪、大条纹激光视觉、激光视觉定位、激光焊缝跟踪、熔池视觉、多信息监控、环保等系统组成,实现双机器人双面双弧焊接、清根打磨、滚压、倒角、焊缝打磨一体化制造。功能如下:
(1)小中大组对及曲面分段机器人自主焊接;
(2)大厚板双面双弧机器人不清根焊接及打磨一体化制造;
(3)复杂结构机器人电弧增减材一体化制造;
(4)多信息融合机器视觉焊接打磨质量预测控制系统;
(5)移动机器人焊接打磨及检测。
1. 小中大组对及曲面分段机器人自主焊接及增减材一体化
配备三类激光视觉传感器,对分段结构进行大线条激光视觉扫描、三维重建及特征匹配、自主焊缝提取,通过激光视觉进行定位,过程中进行激光视觉焊缝跟踪,实现大型分段机器人自主焊接。针对快速制造需求,双机器人进行电弧TIG/MIG增材,过程中进行机器人铣削打磨,实现增减材一体化制造。
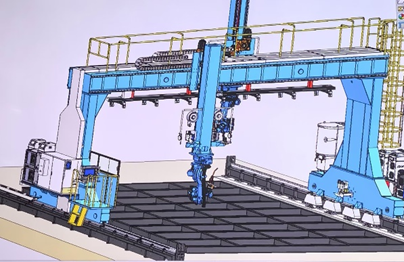
大型钢结构分段双机器人焊接打磨一体化装备
2.大厚板双面双弧机器人不清根焊接打磨系统
针对厚板拼板、T型接头全熔透焊缝,配备基于激光视觉、熔池视觉等机器人双面双弧焊不清根焊接工艺及控制系统;当装配间隙、坡口加工等超差基于多信息感知自适应工艺参数调节系统,实现机器人焊接清根打磨一体化全熔透焊缝制造。

厚板双面双弧机器人不清根焊接打磨系统
3.多机器人焊接打磨多信息融合AI-IOT质量监控系统
基于视觉、电流电压、声音、力位等多信息焊接打磨过程监控,对多机器人系统IOT物联网,实现基于AI焊缝打磨质量预测及参数优化控制。
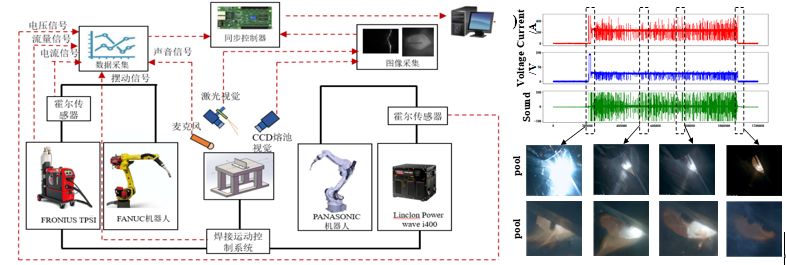
多机器人焊接打磨多信息AI-IOT质量监控系统
4. 移动机器人焊接打磨系统
针对大型结构件配备移动机器人焊接打磨系统,配备激光视觉爬壁机器人焊接系统、移动打磨机器人及相控阵焊缝探伤系统。

爬壁焊接打磨检测系统
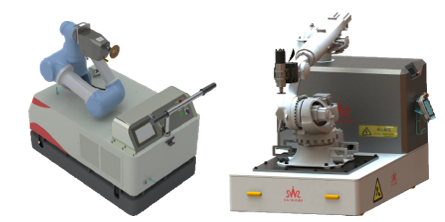
移动机器人打磨系统
中心联系人:刘 露(lucianaliu@sjtu.edu.cn)